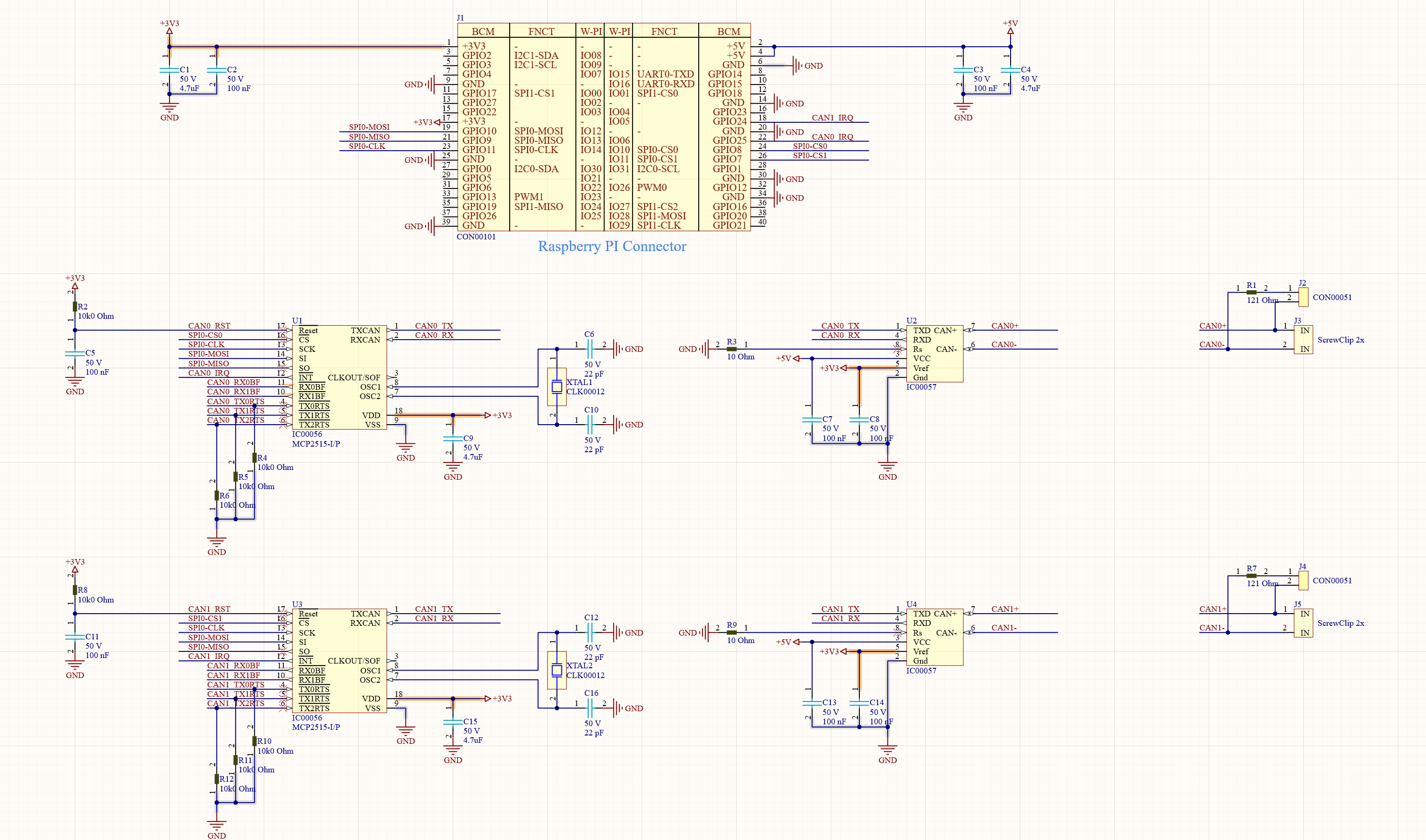
CAN Adapter für den Raspberry Pi gibt es zuhauf, aber wegen des Chipmangels sind manche Bauteile Mangelware. Darum habe ich mal mit DIP vs. SMD experimentiert. Ebenso Lochraster vs. Manhattan Routing vs. SMD Bauteile um alle Engpässe zu umgehen. Der Schaltplan ist für alle Varianten gleich, nur die Bauteile sind DIP/SMD.
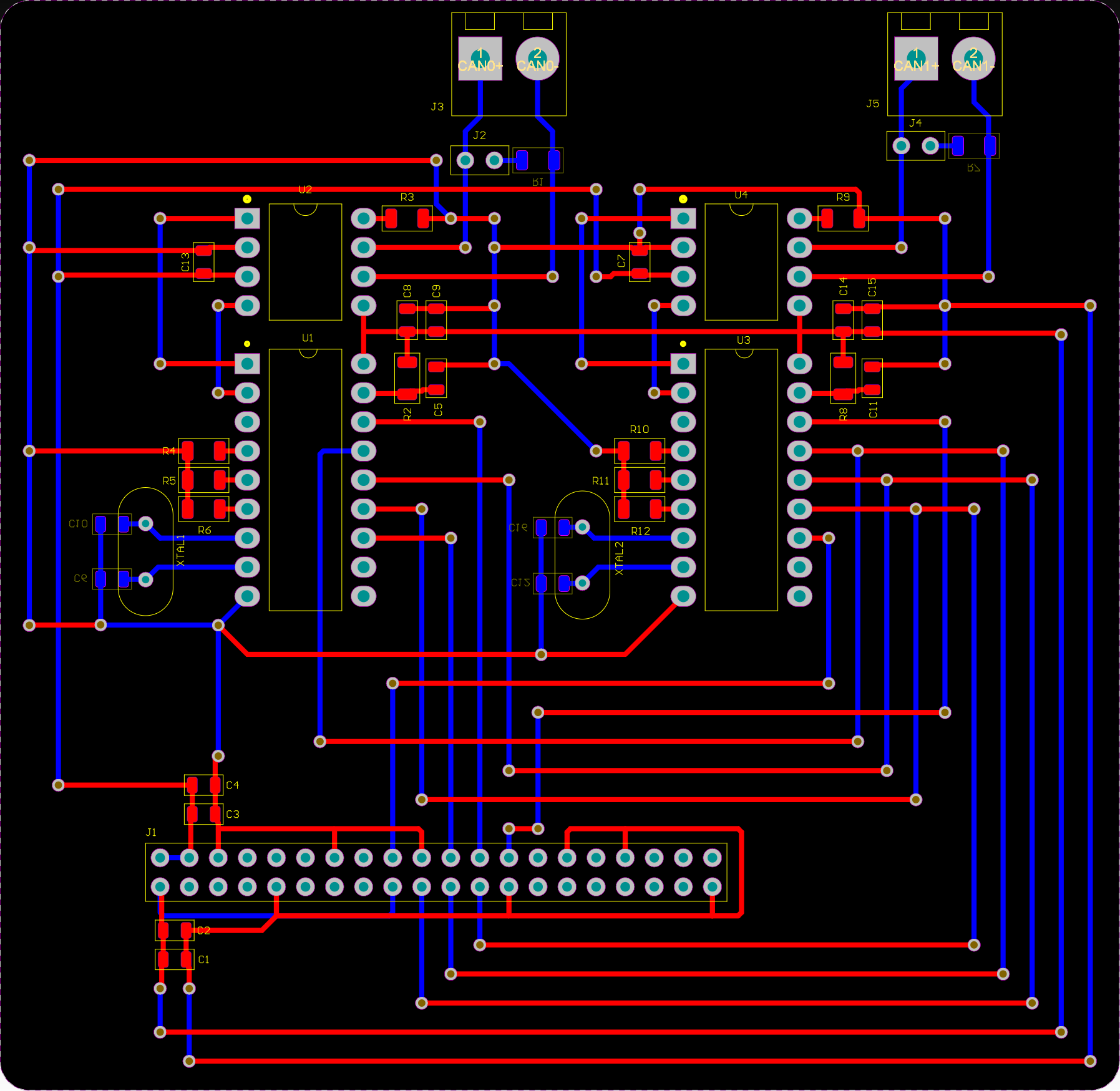
 Das DIP Layout ist im 100mil Raster geroutet, also kann das auch eine Vorlage für ein Routing in Fritzing/Lochraster dienen. Ist nicht sehr platzsparend, aber das ist ja auch nicht das Ziel.
Das DIP Layout ist im 100mil Raster geroutet, also kann das auch eine Vorlage für ein Routing in Fritzing/Lochraster dienen. Ist nicht sehr platzsparend, aber das ist ja auch nicht das Ziel.
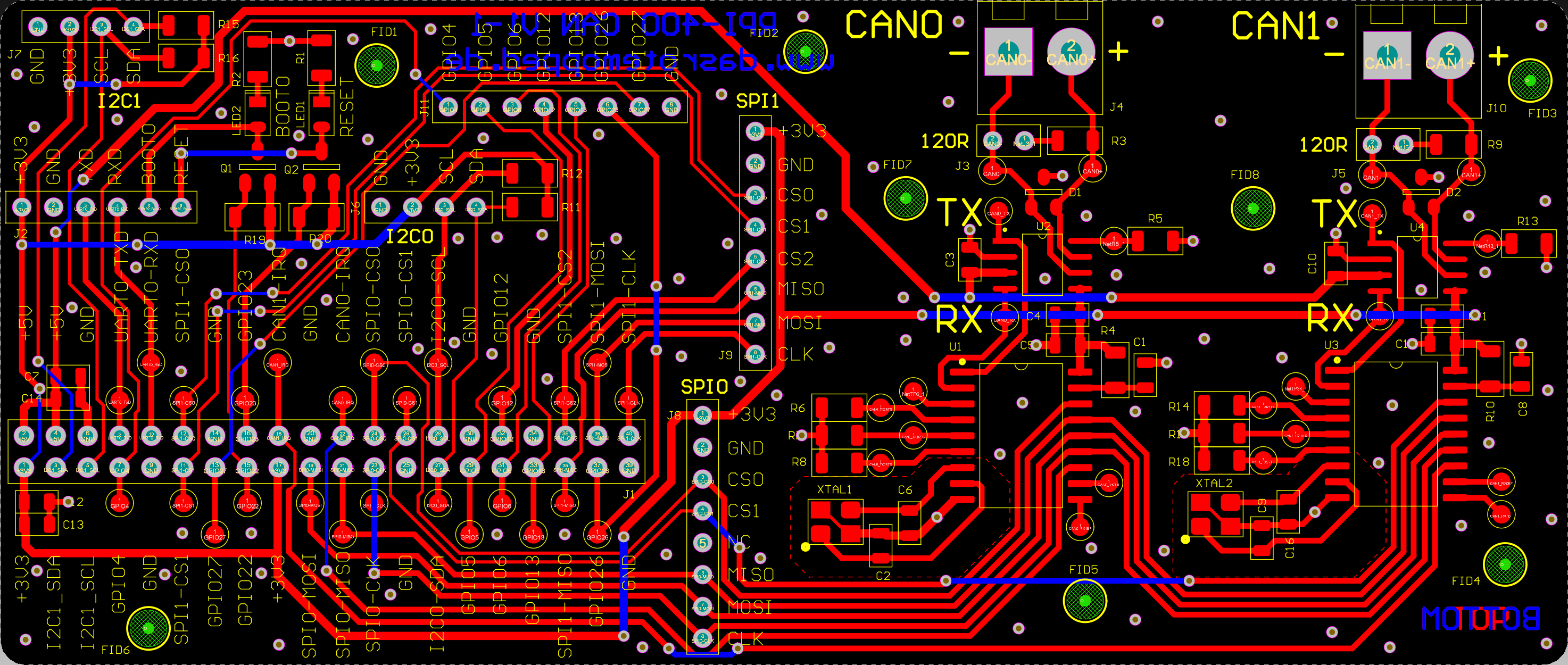
 Hier noch mal das selbe Design als SMD PCB. Der Schaltplan ist identisch, allerdings sind von der RPI-Stiftleiste noch einige Testleitungen abgezweigt, ist ja mehr Platz vorhanden.
Hier noch mal das selbe Design als SMD PCB. Der Schaltplan ist identisch, allerdings sind von der RPI-Stiftleiste noch einige Testleitungen abgezweigt, ist ja mehr Platz vorhanden.
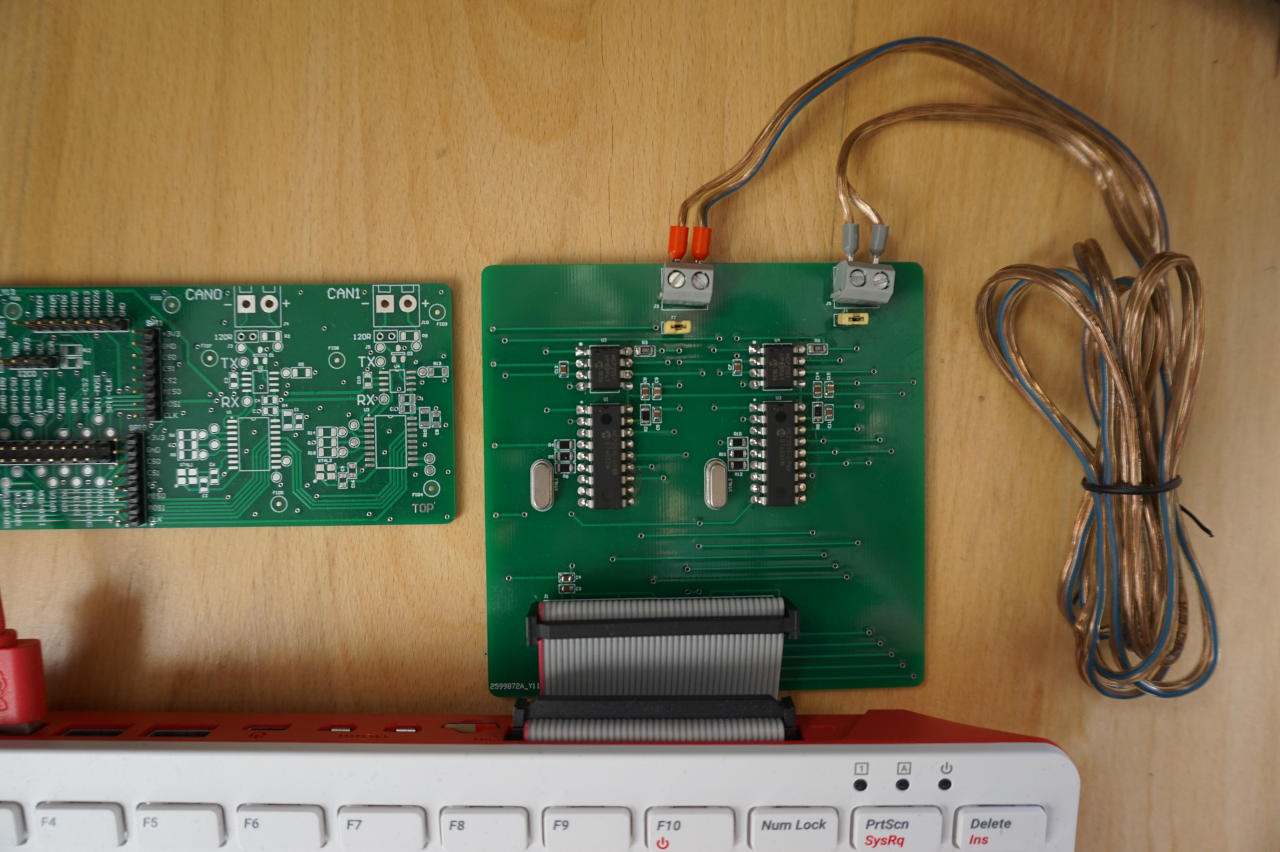
 In RL kann man die Größenverhältnisse gut abschätzen. Mit der Raspbian Konfiguration war ein erster Test erfolgreich, beide CAN Interfaces könen Daten austauschen mit den CAN Utils.
In RL kann man die Größenverhältnisse gut abschätzen. Mit der Raspbian Konfiguration war ein erster Test erfolgreich, beide CAN Interfaces könen Daten austauschen mit den CAN Utils.
|